

Robot Mice Programmed to Have Sex by Scientists Studying Evolutionary Patterns

Scientists at the Okinawa Institute of Science and Technology have used robots shaped like mice having lots of robot sex in order to study the mating habits of 1,000 generations of animals in just a few days.
Polymorphism refers to the evolutionary biological study of mating patterns, how they influence how species reproduce and how each successive generation of a species is born with a slightly different "morph" to enable it to better adapt to changing environments.
Dr Stefan Elfwing, a researcher in the Institute's Neural Computation Unit has demonstrated the usefulness of using robots to study evolution, and his research, entitled "Emergence of Polymorphic Mating Strategies in Robot Colonies" is published in the PLOS ONE journal.
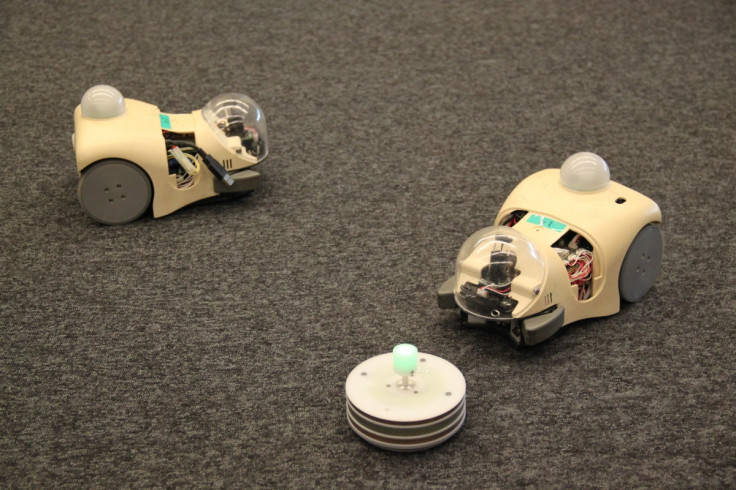
Elfwing built a small colony of Cyber Rodent robots, which come with two wheels, a camera mounted on the front to detect batteries and other robots, electrode teeth to rechargeable from batteries, as well as an infra-red port for "mating".

He then programmed his colony of robots to simulate the evolutionary process over 1,000 generations in each experiment, whereby the robot could execute one of two types of behaviour: either foraging for food (i.e. a battery to charge from) or searching for a partner to mate with.
When a robot saw a potential partner it would like to mate with, the infrared light would flash to copy the genes from the mating partner. However, reproduction between the robots depended on how much energy they had. In order to survive, sometimes the robots would substitute mating for capturing energy sources.
The results of the simulations showed that there were two types of mating strategies – a tracker, which would lie in wait for a mating partner to turn around for mating, or a forager only interested in recharging from the battery, and would only mate if it saw the face of a potential mate.
Out of the 70 experiments carried out with the robots, 25% of the population were identified as foragers, while 75% were trackers, and the evolution that Elfwing noted in the computer simulations was similar to what was seen in the wild.
"In this experiment, our robots were hermaphrodites, [so] all robots mate and can produce offspring," said Dr Elfwing.
"In the next stage, we want to see if the robots will take on male and female roles, by taking different risks and costs in reproduction. The behaviour exhibited by the two strategies, Forager and Tracker, may be a precursor to the adoption of distinct genders."
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology



















