

Wall-E Robot Construction Crew Build Without Human Direction


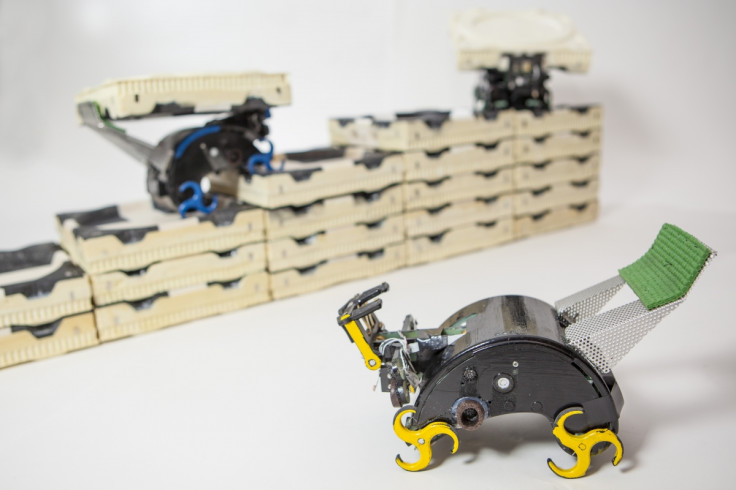
A team of computer scientists and engineers at Harvard University and the Wyss Institute for Biologically Inspired Engineering have developed a system of self-organising robots that can work together to build towers, castles and pyramids out of foam bricks - without human direction.
The robots are so intelligent that they can build staircases to reach the next construction point, and even understand the concept of obstacles.
The Termes system, the result of four years of research, requires no supervision or human communication. It is inspired by the collective intelligence and resilience seen in termites.
Each robot executes a building process in parallel with other robots, although it is not aware of what the other robots are doing.
If a robot breaks down, the rest of the team continues building uninterrupted - similar to Wall-E, Disney's beloved trash compactor robot, who was the last robot on earth.
"The key inspiration we took from termites is the idea that you can do something really complicated as a group, without a supervisor, and secondly that you can do it without everybody discussing explicitly what's going on, but just by modifying the environment," said principal investigator Radhika Nagpal, Fred Kavli professor of computer science at the Harvard School of Engineering and Applied Sciences.
Nagpal is also co-leading the Bioinspired Robotics platform at the Wyss Institute.
Termites rely on "stigmergy", a type of implicit communication where they observe each other's changes to the environment they are in and act accordingly.
"Normally, at the beginning, you have a blueprint and a detailed plan of how to execute it, and the foreman goes out and directs his crew, supervising them as they do it," said lead author Justin Werfel, a staff scientist in bio-inspired robotics at the Wyss Institute.
"In insect colonies, it's not as if the queen is giving them all individual instructions. Each termite doesn't know what the others are doing or what the current overall state of the mound is."
The Termes system makes use of distributed algorithms that enable very large groups of robots to act as a colony. The robots themselves require only four types of sensors and three actuators.
Harvard University and the Wyss Institute are also working on other artificial intelligence robots, including RoboBees, a project inspired by the biology of bees, which could be used to pollinate crops, for search and rescue, hazardous environment exploration or military surveillance.
"When many agents get together - whether they're termites, bees, or robots - often some interesting, higher-level behaviour emerges that you wouldn't predict from looking at the components by themselves," says Werfel.
"Broadly speaking, we're interested in connecting what happens at the low level, with individual agent rules, to these emergent outcomes."
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology



















