

MIT Develops Athletic Robot That Leaps And Springs Like A Cheetah
MIT researchers have employed an algorithm to enable a robotic cheetah to go "bounding" across a lawn at 16 kilometres per hour.
This is much lesser than an actual cheetah's 97 kilometres per hour, but the team expects to rev up their cheetah-bot to 48 kph soon.
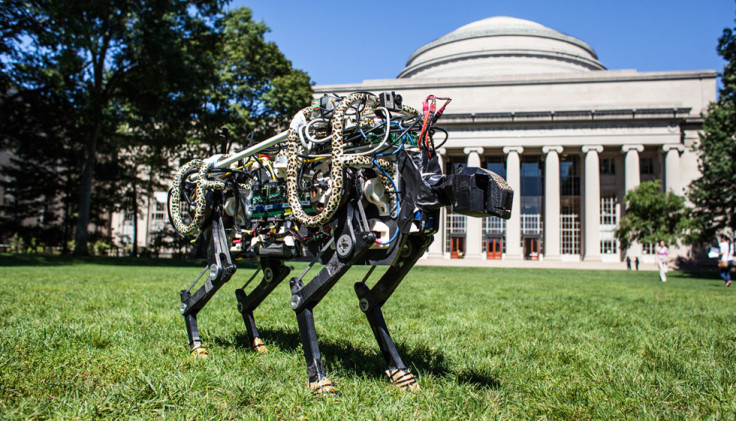
The four-legged assemblage of gears, batteries and electric motors weighs as much as its feline counterpart. It continued to run at the same speed after clearing an obstacle.
The team looked at a force-based approach with their algorithm, instead of one based on fast cycling legs.
A real life bounding animal's front legs hit the ground together, followed by its hind legs. The less time it is in contact with the ground, the faster its movement.
Using this concept, the MIT team developed the algorithm to determine the amount of force a leg should exert on the ground in the short period to compensate for the gravitational force.

The faster the desired speed, the more is the force that must be applied to propel the robot forward. This also allows the animal/bot to increase the stride length.
They then programmed each of the robot's legs to exert a certain amount of force to maintain a given speed.
The cheetah-robot carries a custom-designed, high-torque-density electric motor controlled by amplifiers. The motor and the bio-inspired legs allow the right force control on the ground.
The work was supported by the Defense Advanced Research Projects Agency.
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology



















