

MIT's 3D-Printed Underwater Robot Detects Illegal Goods Hidden Under Ships

Mechanical engineers from Massachusetts Institute of Technology have designed a new submersible robot that can boost port security by detecting drugs and contraband being smuggled aboard ships at port in hidden compartments.
The small oval-shaped robot was built using 3D-printed components and uses ultrasound technology to search for false hulls and propeller shafts, which are popular ways smugglers use to hide illegal goods.
The idea is for these small robots to be hidden underwater in the port, perhaps concealed in clumps of algae or made to look like a rock, so as not to alert smugglers. Fleets of the robots could then quietly skim along the bottom of a ship's hull, aided by a flattened panel to hunt for contraband.

"It's very expensive for port security to use traditional robots for every small boat coming into the port," said Sampriti Bhattacharyya, a graduate student in mechanical engineering, who designed the robot together with adviser Ford Professor of Engineering Harry Asada.
"If this is cheap enough — if I can get this out for $600, say — why not just have 20 of them doing collaborative inspection? And if it breaks, it's not a big deal. It's very easy to make."
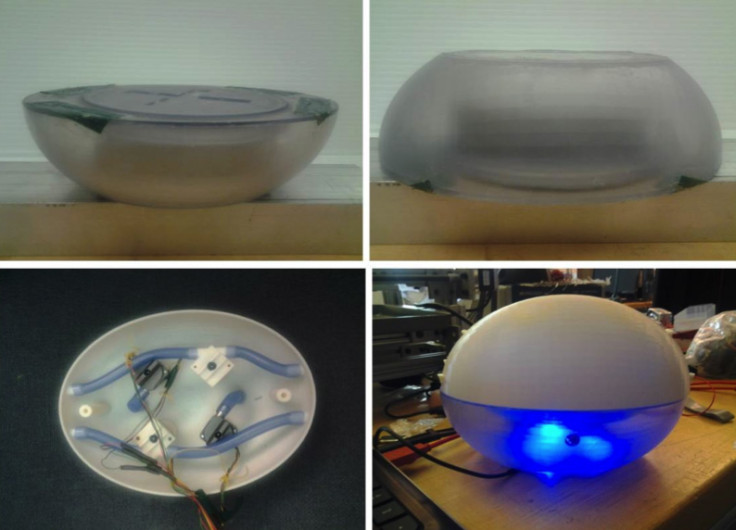
The electronics are contained in the half of the robot near the flattened panel and is waterproof, while the other half of the robot is permeable, housing a propulsion system with six pumps that expel water through rubber tubes.
While two of the tubes vent on the side of the robot opposite the flattened panel, the other four tubes vent in pairs at opposite ends of the long axis of the robot, controlling its locomotion.
The design is deliberately made to be unstable to aid the robot in being able to turn and execute tight manoeuvres without problems.
Imitating jet propulsion in fighter jets
"It's very similar to fighter jets, which are made unstable so that you can manoeuvre them easily," Bhattacharyya said. "If I turn on the two jets [at one end], it won't go straight. It will just turn."
The first prototype of the robot was powered by rechargeable lithium-ion batteries that last for 40 minutes and has been able to navigate underwater and stay in contact with a surface underwater while travelling in a straight line.
However, the next prototype will include ultrasound sensors and wirelessly rechargeable batteries that can last on a single charge for up to 100 minutes. This would be ample time for a robot to search the hull of a ship, since it is able to travel between half a metre to a metre per second while pressed against the surface of the ship.
US Air Force special tactics officer Nathan Betcher has been following the MIT researchers' work closely.
"I have a great deal of interest in seeing if this type of technology can have a substantive impact on a number of missions or roles which I might be charged with in the future," he said.
"I am particularly interested to see if this type of technology could find use in domestic maritime operations ranging from the detection of smuggled nuclear, biological or chemical agents to drug interdiction, discovery of stress fractures in submerged structures and hulls, or even faster processing and routing of maritime traffic."
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology



















